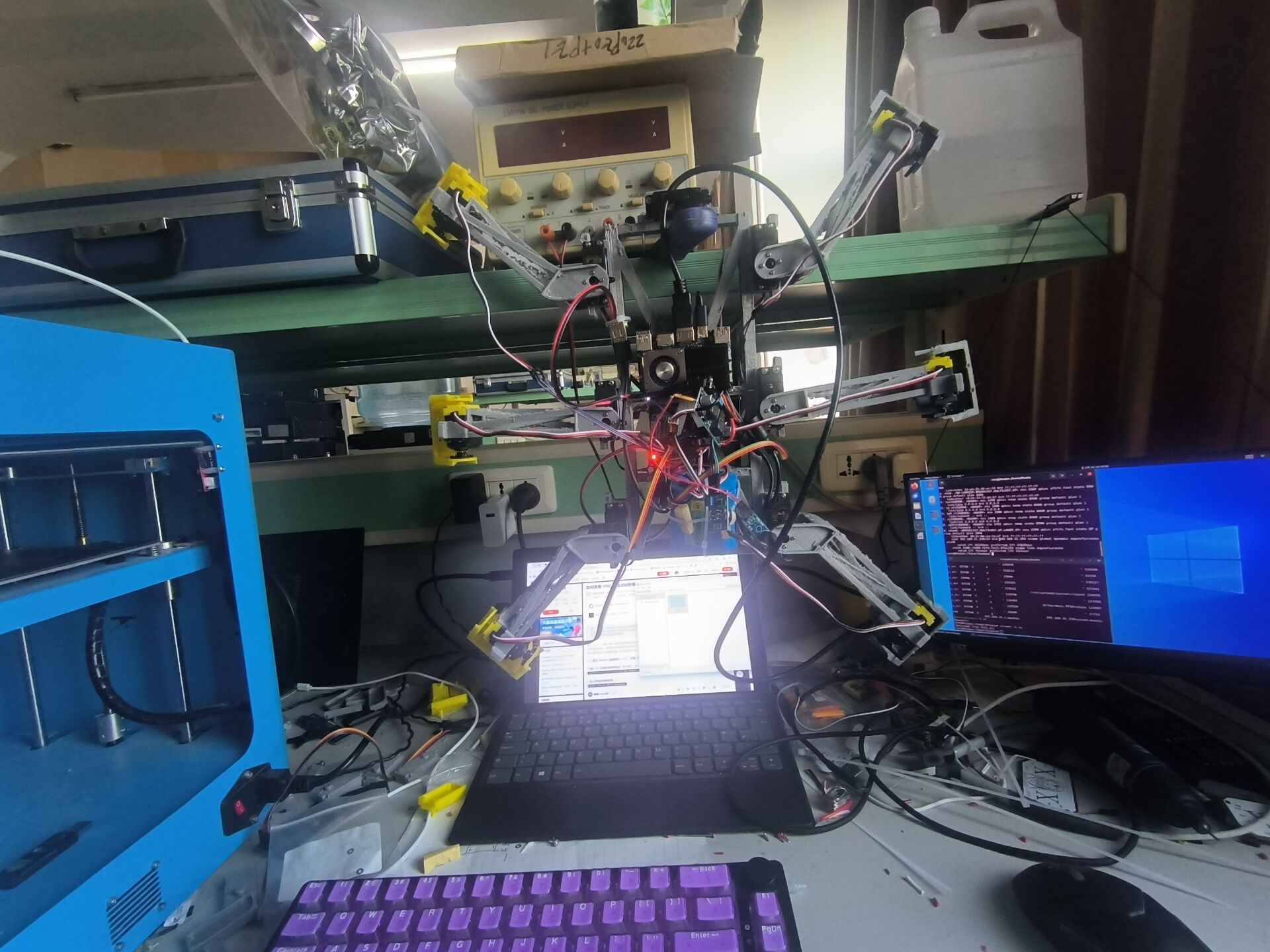
基于视觉识别的六足勘测机器人

主要模块:
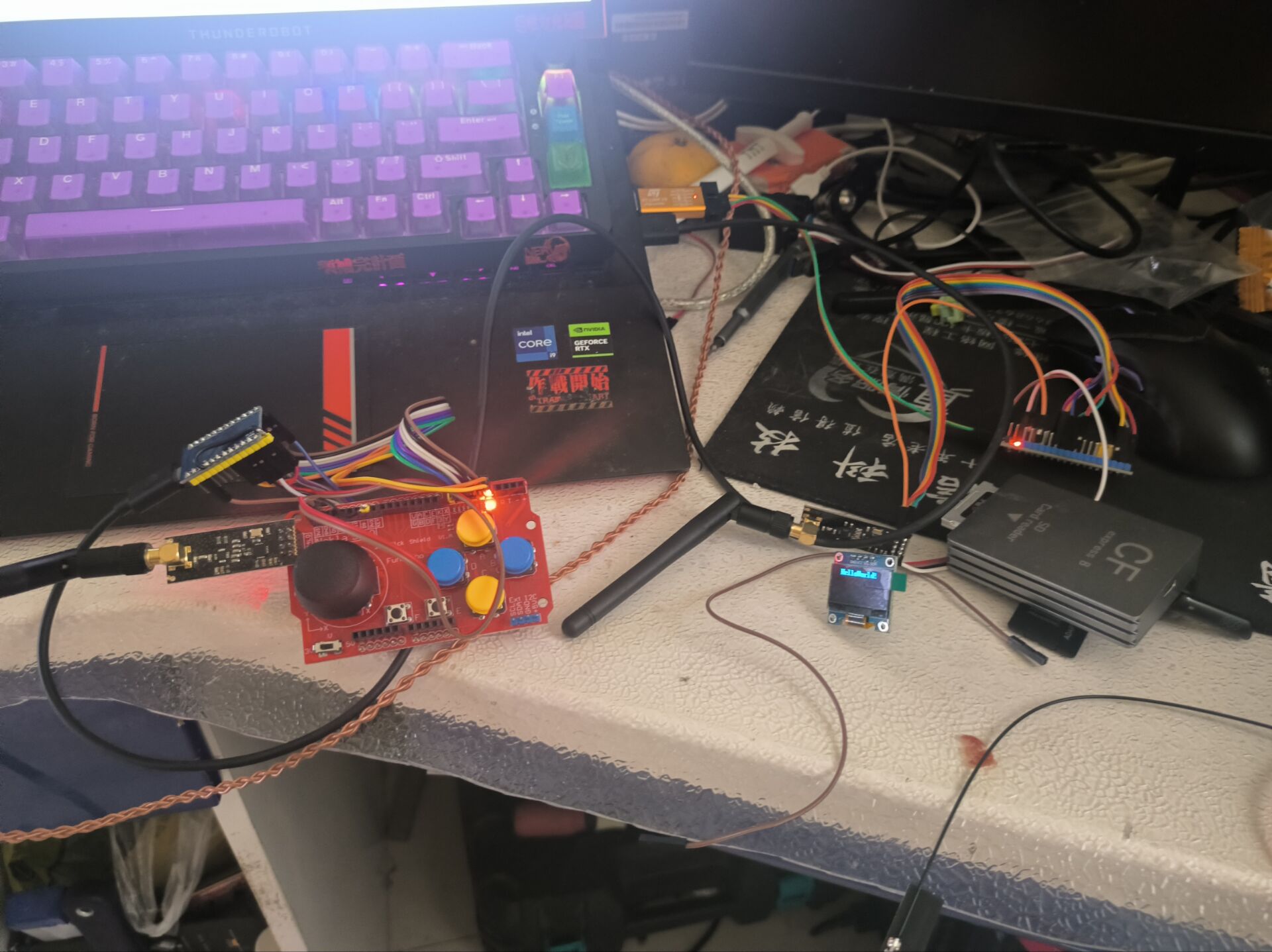
主控:KHADAS VIM3 PRO STM32C8T6 ARDUINO PRO MICRO
传感器:SHT30温湿度传感器 GY-BMP280大气压传感器 GY-291 ADXL345 重力加速度倾斜模块
GY-NEO-6MV2 GPS模块 NRF2401无线收发模块 MAX4466声音传感器/INMP441麦克风模块
GY-530 VL53L0X 激光测距 TEMT6000环境光传感器 HC-SR04次声波模块
joystick

前期开发实验室提供场地以及3d打印机:


目前处于开发阶段;