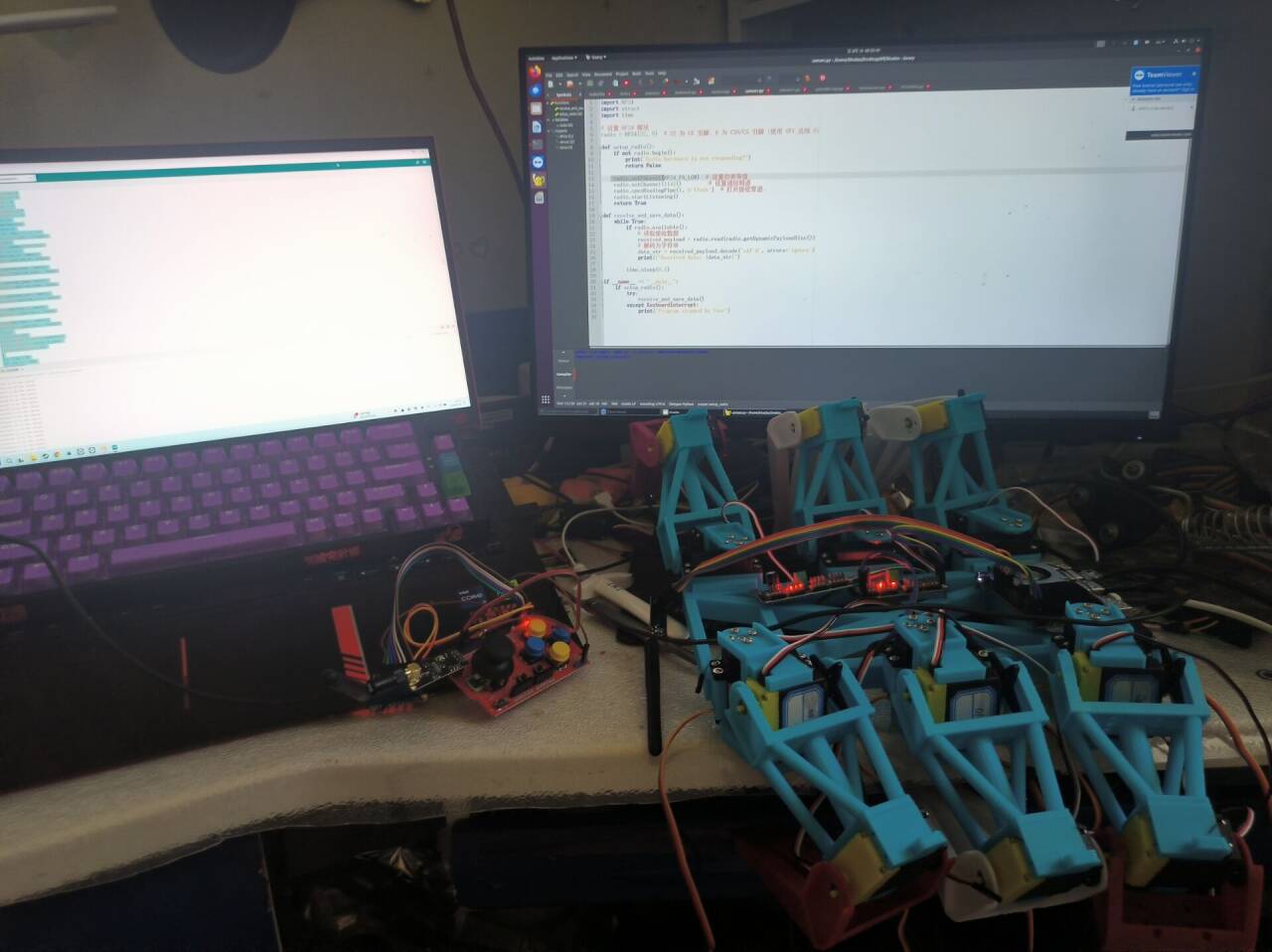
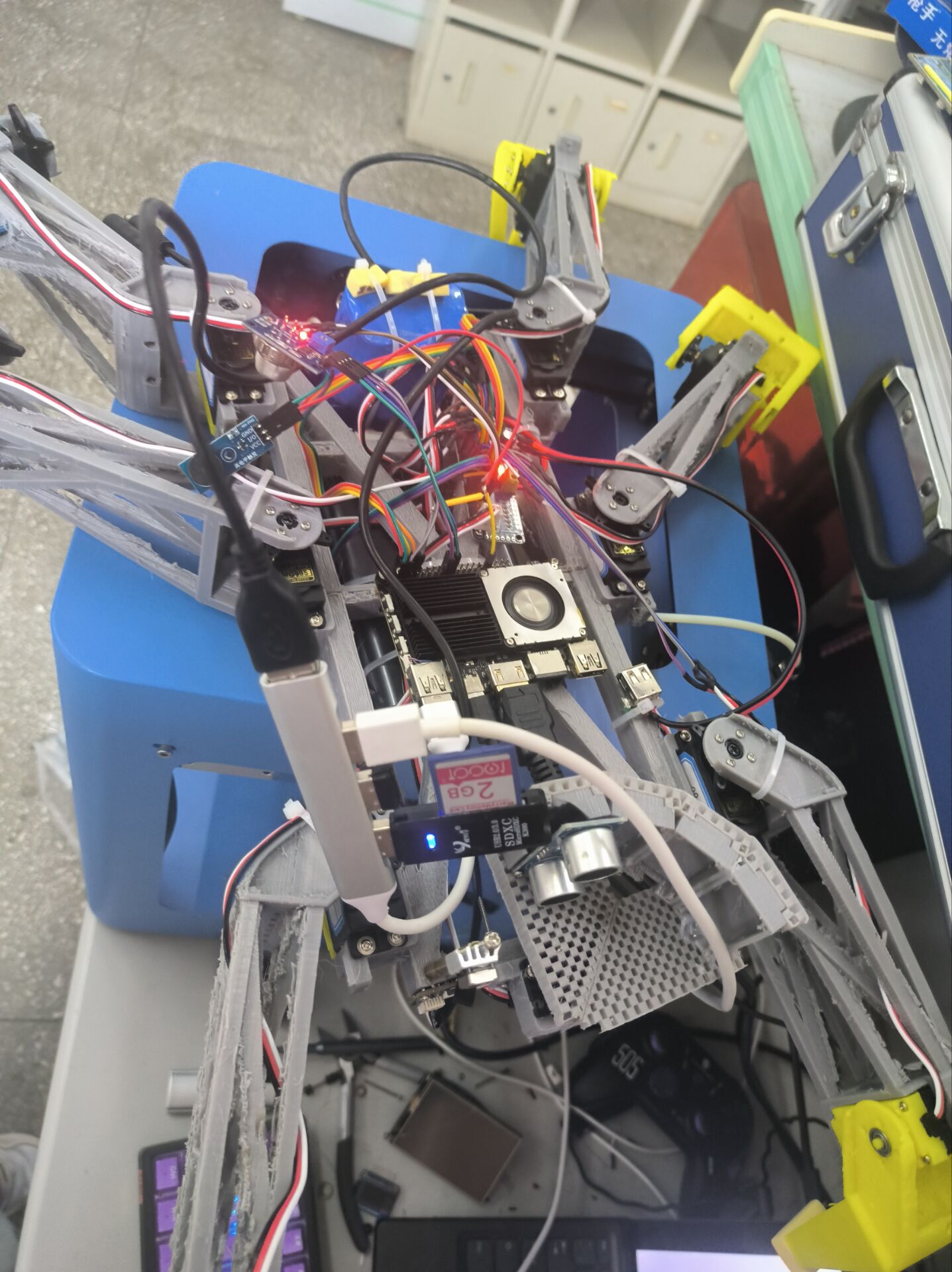
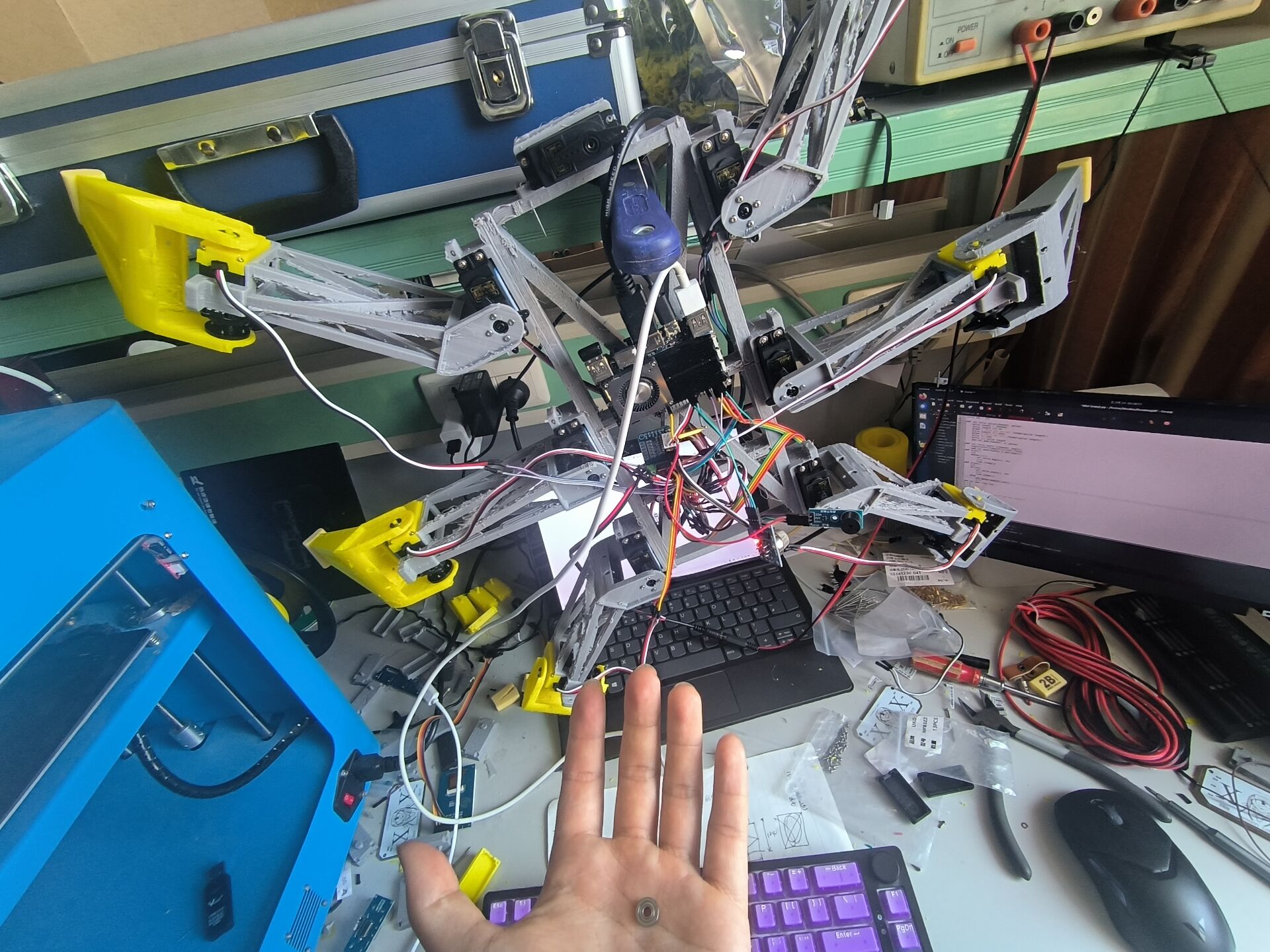
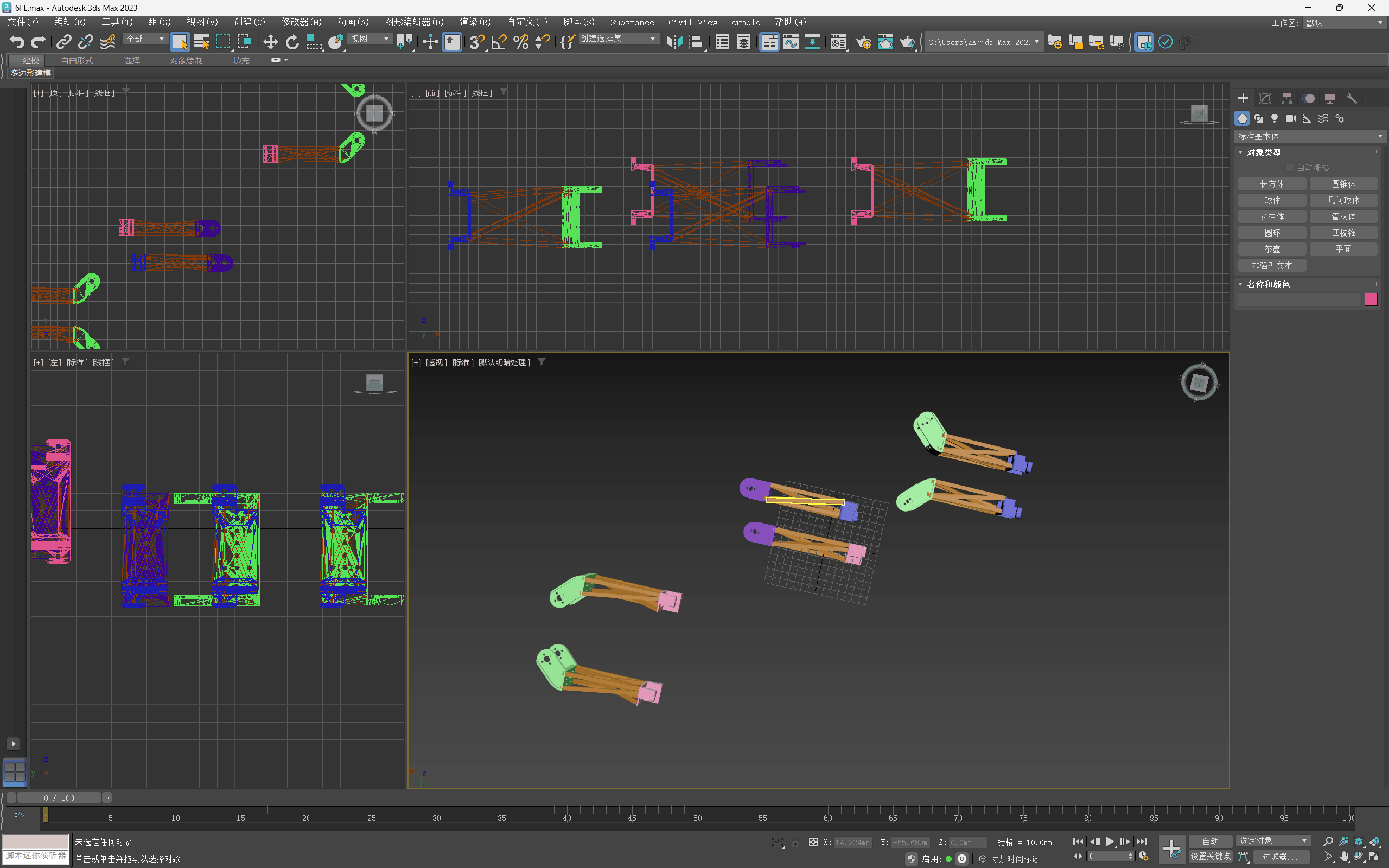
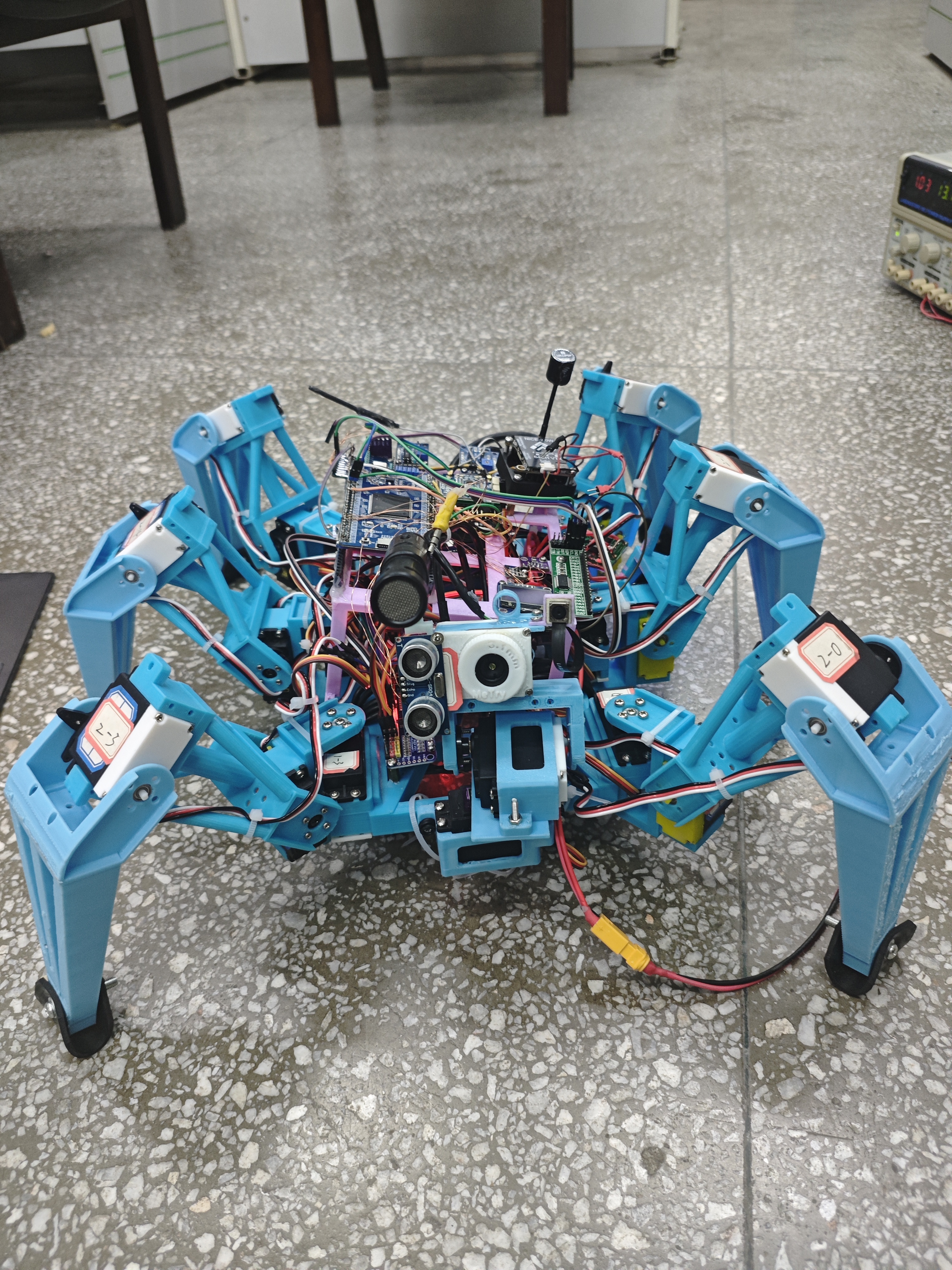
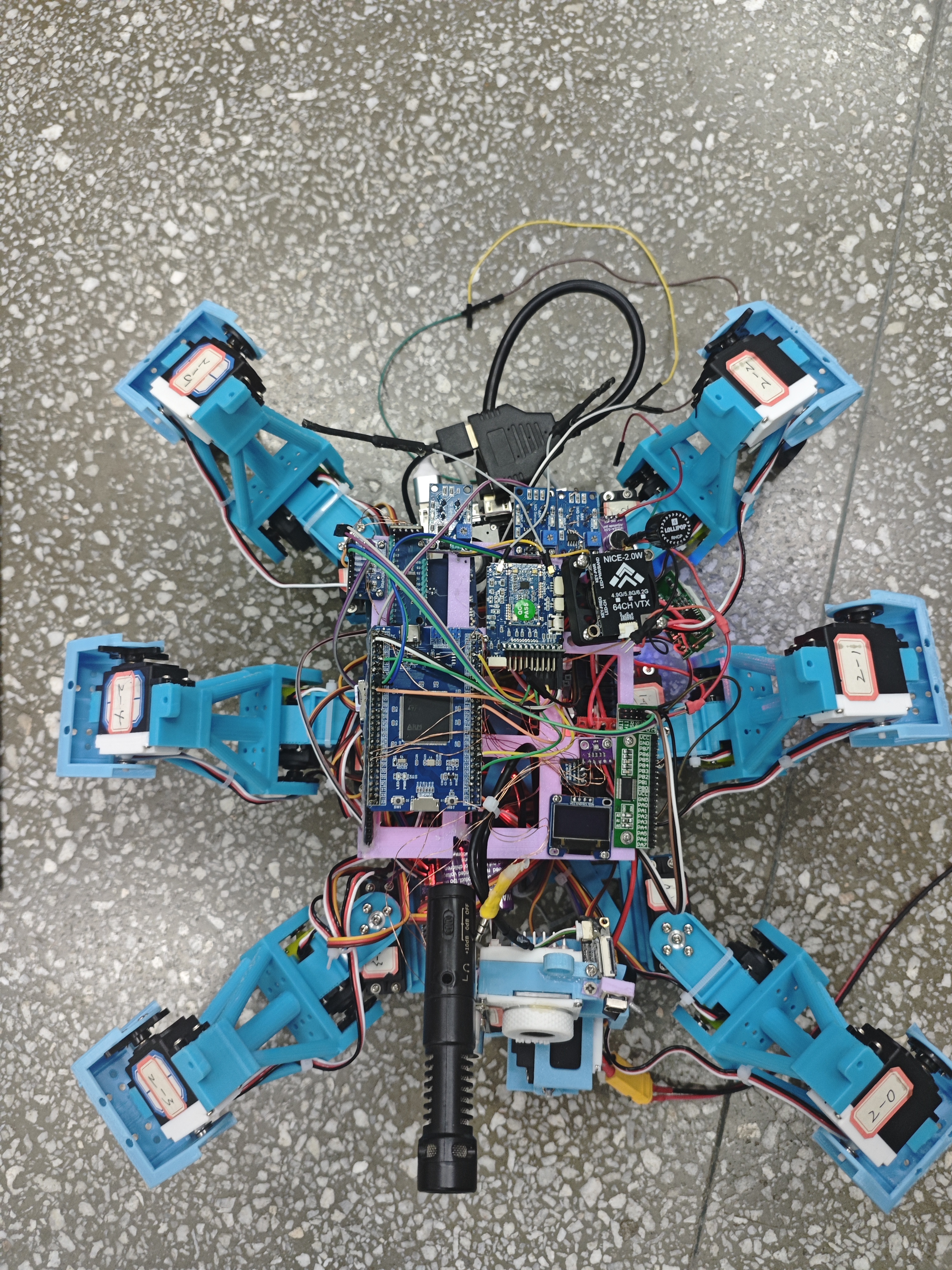
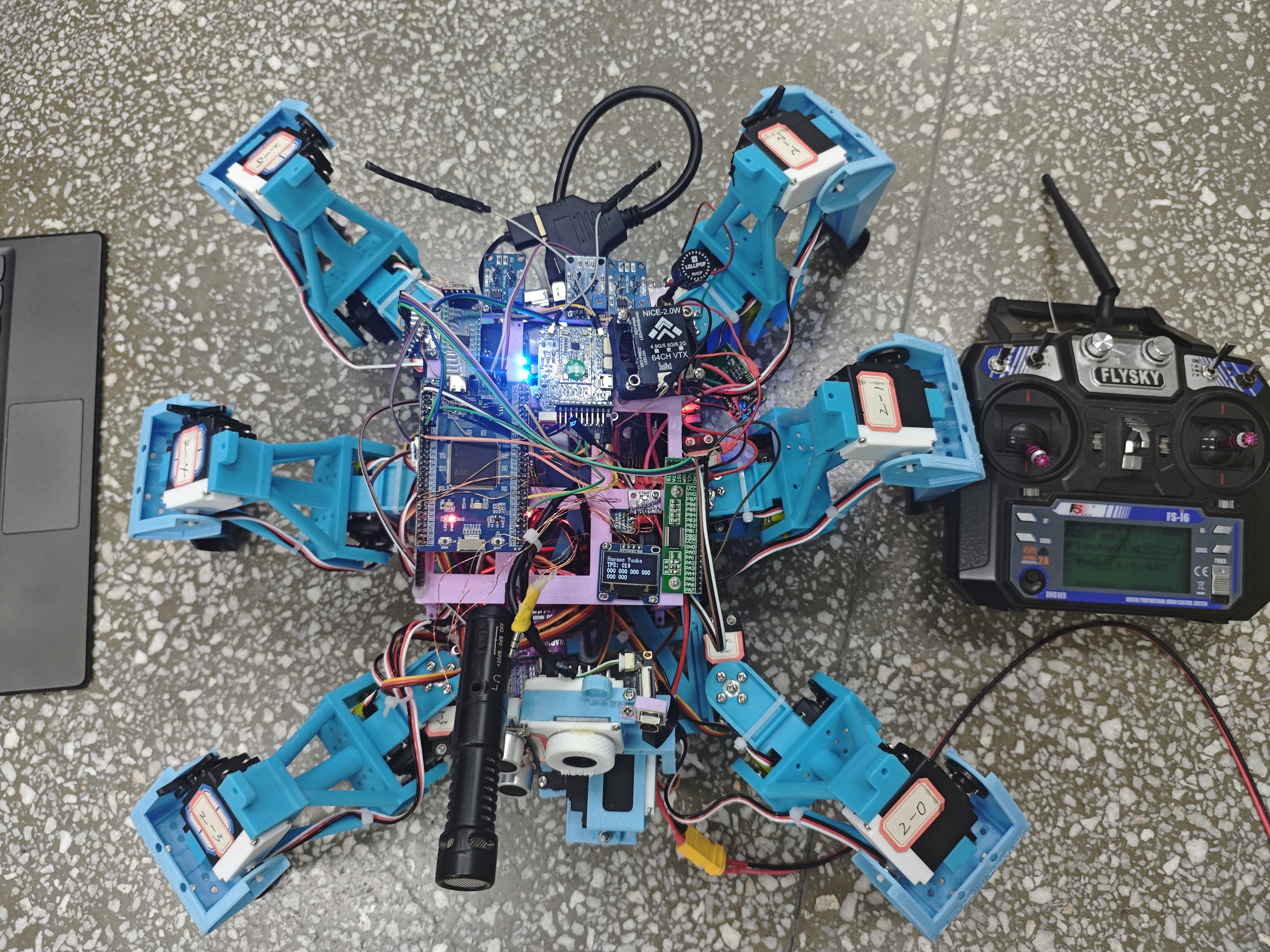
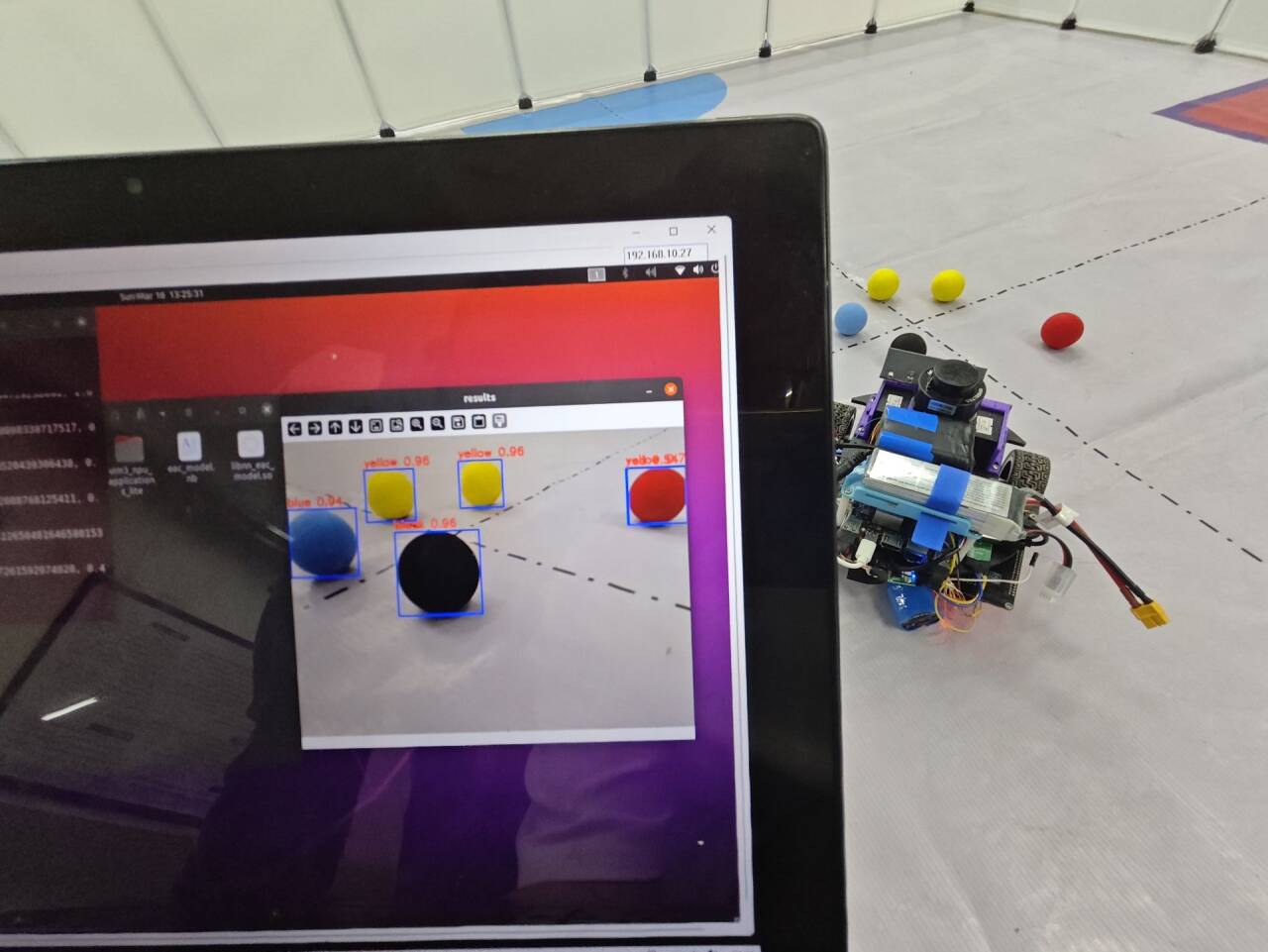
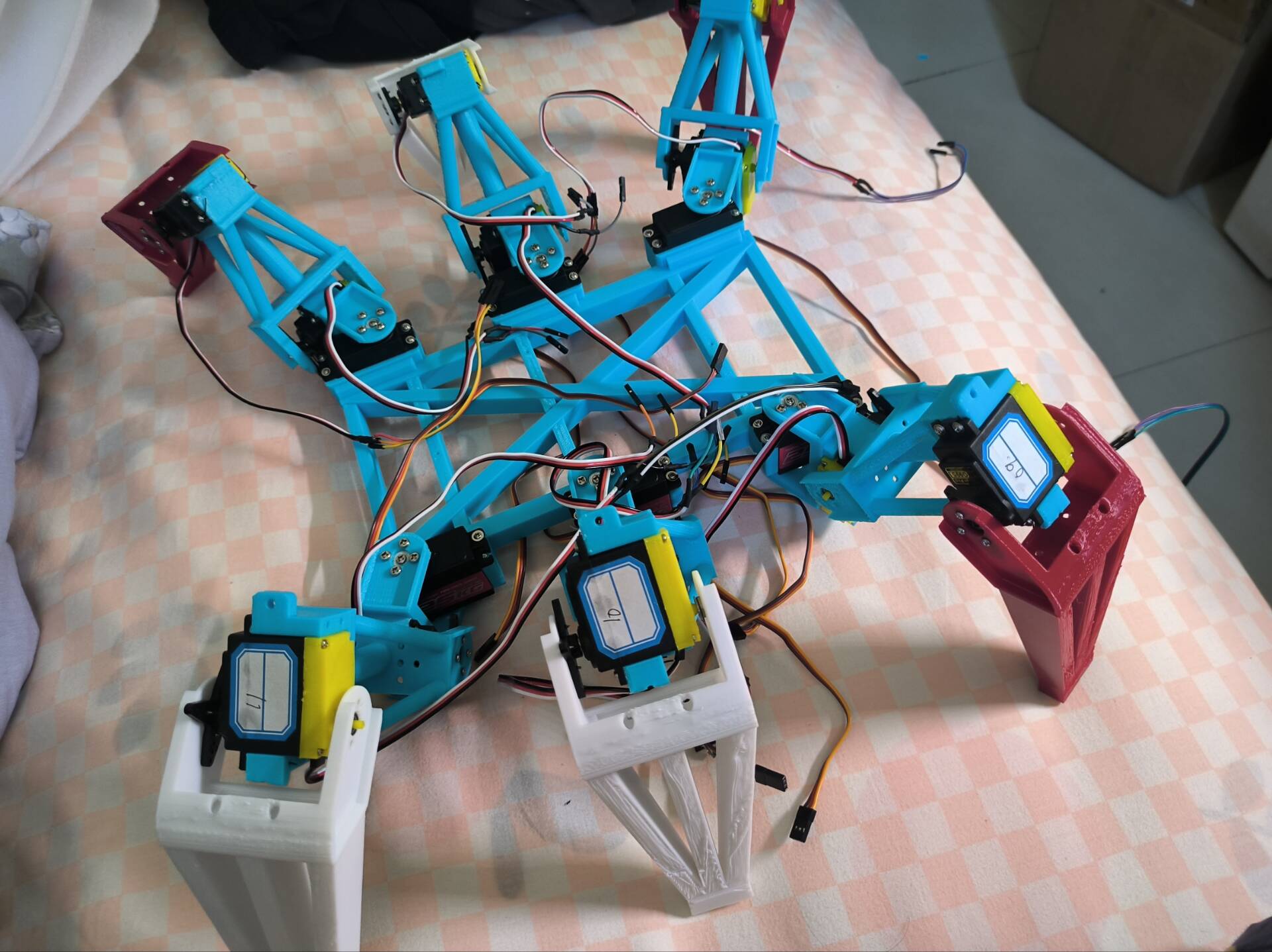
基于视觉识别的六足勘测机器人
主要模块:
主控:KHADAS VIM3 PRO STM32F103ZGT6
传感器:SHT30温湿度传感器 GY-BMP280大气压传感器 GY-291 ADXL345 重力加速度倾斜模块
GY-NEO-6MV2 GPS模块 NRF2401无线收发模块 MAX4466声音传感器/INMP441麦克风模块
GY-530 VL53L0X 激光测距 TEMT6000环境光传感器 HC-SR04次声波模块
研究方向:传感器使用,yolov8模型部署,linux arm上位机学习,3d结构设计。
23大创-省创,25-ican
成员:23张奥宇, 23丁兴达,23王鑫,23陈宇航,23张晗睿