25电赛记录
——————–个人向23张奥宇
电赛的前两天。
备赛阶段我们做了基本的巡线小车。以及用mp M0的单片机写了一些基本步进电机的控制库。并且能做到很精细的控制。因为还有参加集创赛的缘故,也就提前备战了两天,熟悉了一下ti的板子。电赛的前一天晚上。也是简单的用3ds max设计了打印了车底盘和云台,M0芯片做好了巡线小车上位机实现了精细控制云台。然后美美睡觉了。
电赛当天(7.30)
早上7:20醒来。结果刚洗了漱,7:23就发题了。急急忙忙洗完漱去实验室一起商讨。
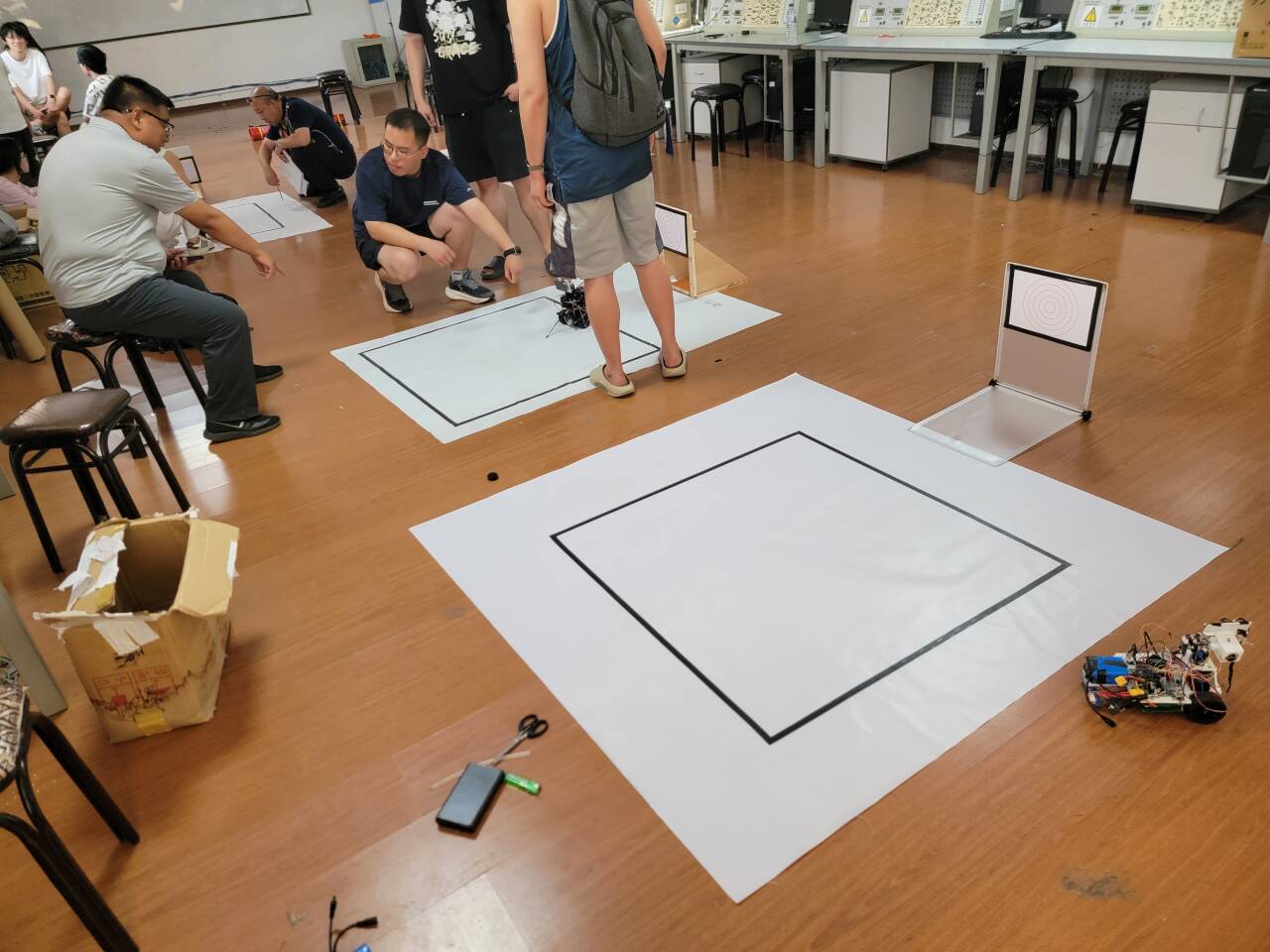
到了实验室发现,诶,这不刚好压到题了吗?云台做好了,巡线也做好了。ti就是我兄弟啊,这还说啥了?直接布置场地开整调试,然后就是吃屎的开端。粘的场地胶带,非常垃圾。实验室的地板是大理石花纹,导致需要再粘一圈白色胶带。粘完白色胶带后发现稍微压住了一点黑色电工胶布,电工胶布本来就只有18mm宽粘的时候拉长了还压了一点儿,就导致有的角落非常难寻。并且一开始用的是张大头的28步进电机跑的巡线导致一开始想的是速度要快,调的参数就很激进而且想的方向也不对,是按照rc的思路做的。导致巡线一直发生震荡,各类小问题。后来有一个同学很快的就做好了稳定的巡线。让我恍然大悟,其实速度没那么重要,只要稳定就行了,非常简单的,遇到直角就原地减速转弯就能解决了。这时候已经是第一天晚上了。软件的同学也已经写完了霍夫什么圆的检测。心里想的进度可能还行吧,又美美睡觉去了。

第二天(7.31)
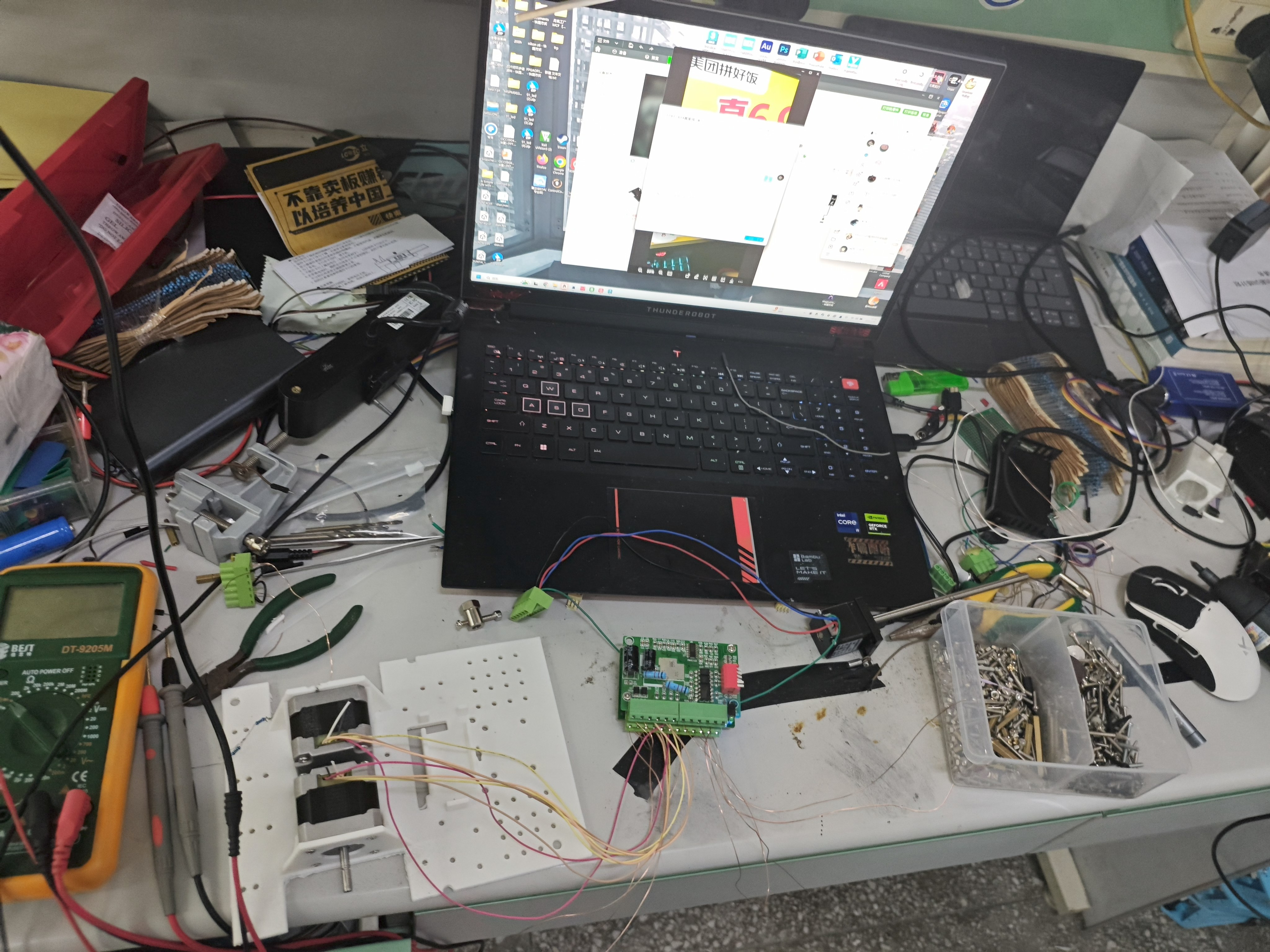
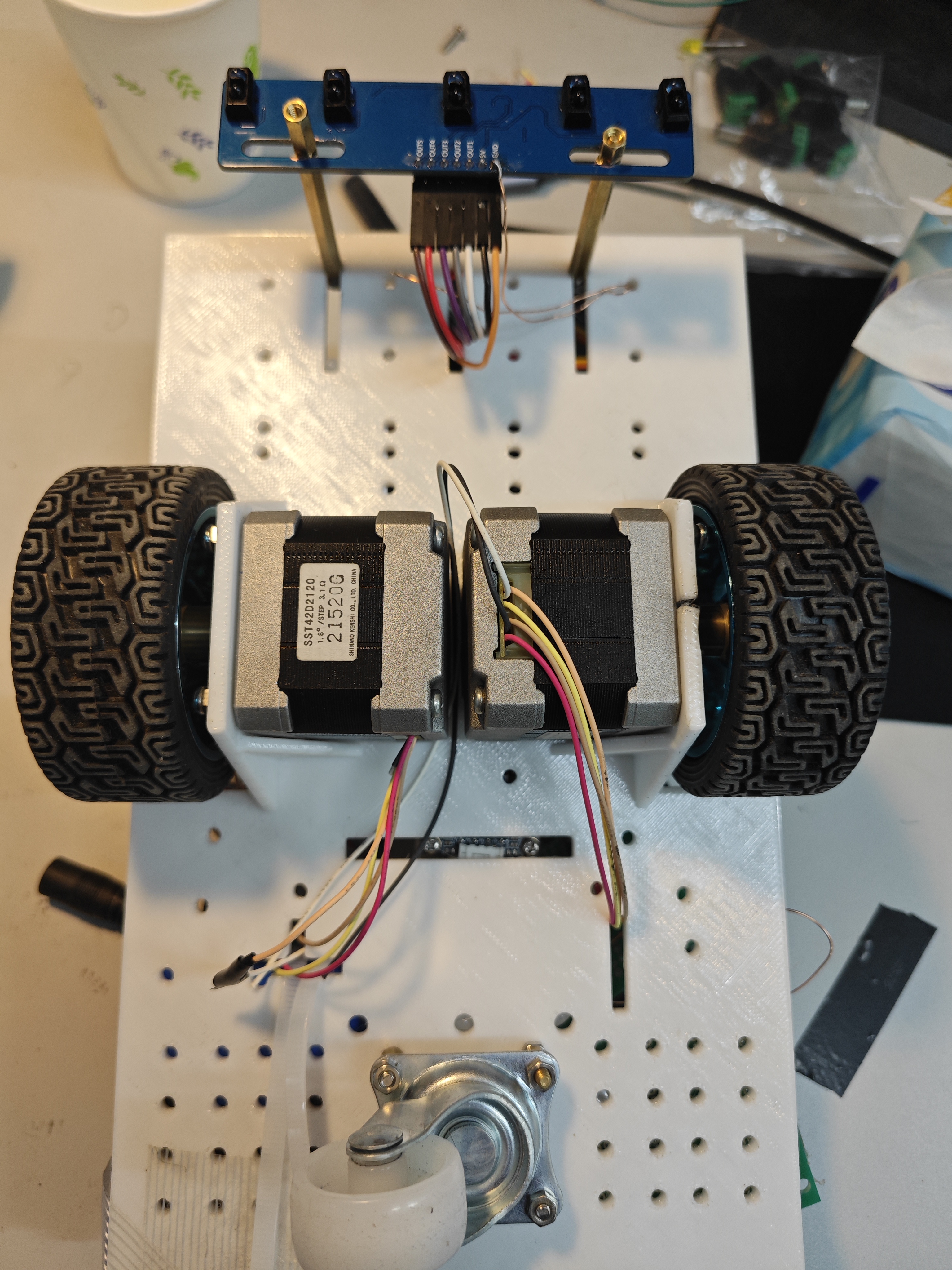
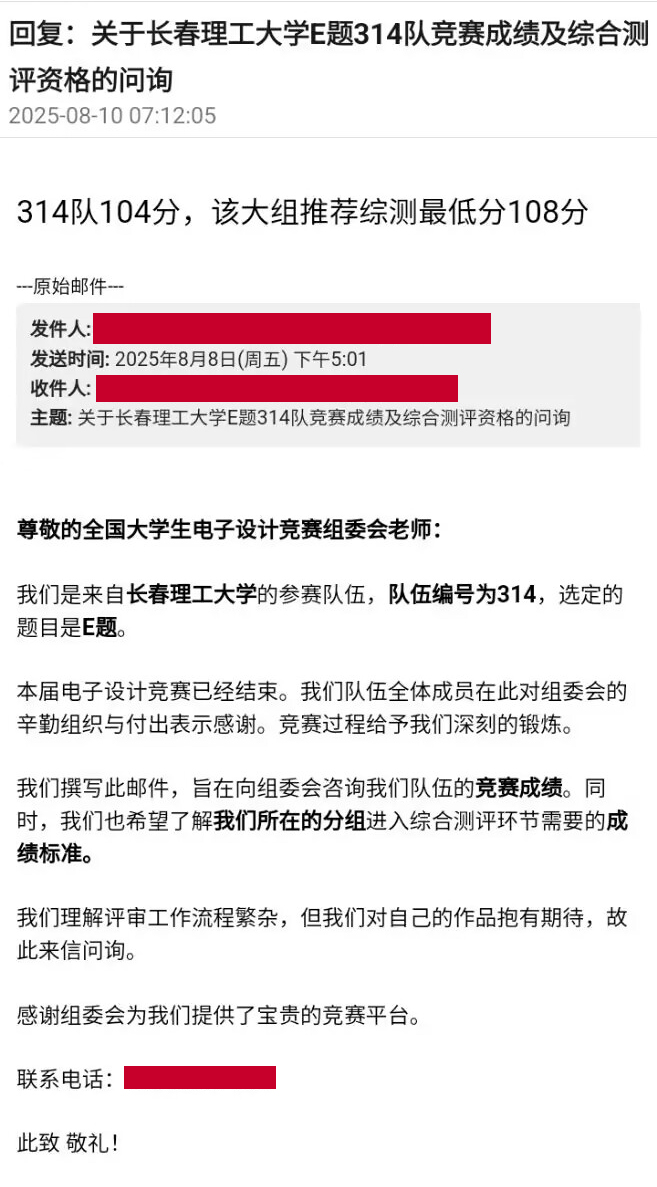
再到后来发现需要提高点儿速度,就需要把转弯轴与巡线小车的光电传感器距离较远一点儿,这时候突然想起来题目要求必须是ti直接控制电机。张大头的闭环布进,就没有任何屌用了(有侥幸心理,后来向组委会提问的回执中也明确说明了不能用。串口控制的带其他非ti mc u的控制器。嗯非常的操蛋。然后当场买了本地的4个Tb6560步进电机控制器。以及以30块钱每个的价格去电子市场买了4个42步进电机。在等待的过程中,先用实验室原有的步进电机驱动器简单搭建了一下。3号位同学也是花了一下午时间写出来了用ti控制产生PwM脉冲频率的程序,正好这期间我把线也接好了车也整的差不多。然后又美美睡觉了。
第三天(8.1)
好了从今天起到电赛结束,不会有任何闭眼的时候了。非常早的就自己醒来了,早早的去实验室把车装上,把车重新设计了,并把底盘的驱动稍微写了。然后所有东西组装起来,已经能控制车跑了。后来是采取了两个四路的巡迹前一个作为直角转弯的预测。后面的作为是否线上的巡线。这样又能提前预知到转弯还能提高一点速度。然后就是调了一下午到晚上的车。已经能在规定时间内完成巡线和转弯。在这期间软件同学也改了方案,从圆检测改为黑框检测了。3号位同学也拿到确定的方案,开始写报告。然而噩梦也刚刚开始。想着今天晚上能调好车。就把云台和车装一块儿联调一下。装好后这天晚上我挺闲的,软件同学把云台架到车上后一直在搞云台的算法,这时候我就把电源模块焊好了也大概想了一想圈数的控制怎么写。到了后半夜软件同学没什么劲儿了,实验室同学都一开始一块儿开始吹水了。又开始调小车的巡线,本来只有底盘的时候还加了500g负载调的巡线。因为云台也重500g左右测的。但是把电池和云台一放上去,整车开始跑的时候又跑飞了。
然后又调巡线到第二天早上,期间发现的问题包括且不限于只要一使用iic 的oled屏Ti的板子的中断触发就会变得慢。导致直角识别不及时,冲出巡线范围,这个问题是困扰最久的。包括之前程序莫名其妙的跑飞,也是因为IiC的屏幕连接只要有一根线松动Ti的板子收不到ack应答就会跑飞。在测试期间,就暂时带着oled看信息写完了圈数计算。然后又重新设计按键设定圈数的逻辑大概原理就是用户按键两个,一个发光二极管,看你按键按了几回,轮流设置1至五圈通过二极管的闪烁频率来看,设置了几圈这样过后去掉iic所有设备就发现中断能及时被触发,小车巡线就变正常了。。。。。到这里已经第4天中午了。软件同学也是放弃了光流模块。先把基础的第二问,第三问的打靶做完了。第4天的效率真的很低,因为一晚上没睡觉后整个人浑浑噩噩的。我们采用的是Linux上位机相对于大部分人用的k230之类的会稍微麻烦。但是软件同学很给力开机启动,环境干扰也做完了,Pid的移动打靶也做了,但是效果不是很好,需要有闭环编码器或者mpu6050是闭环会好些,也做了6050的补偿但是实际上不是很好用。这时候就已要封箱了。
测试当天8.4
本来通知的是8月5号上午8点开始测试,但是8月4号下午4:30就突然通知我们去进行测试。8月4号的中午,我们才把额外的场地布到手担心比赛方给的场地会有问题。到了光华学院,没有任何质疑,跟着存车时的记忆找过去志愿者全在睡觉,没有人理一群e题来测试的同学然后我们主动去问才去拿车,拿上车后说评委开始吃饭了,先让我们在楼道等着吧。等评委吃完饭后开始测试了,一间教室可以两组同时开测。
我们组现在调试,然后拆封发现。上电后板子工作正常,指示灯也正常闪烁,就是光电模块怎么触发小车都不会改变速度,当时那个冒冷汗。不过幸亏装备比较全,最后检查出来是电池放了一天就不知道为什么没电了。也带了备用电池。并且光华学院提供比赛场地,折痕明显,反光严重最后用自己的场地调试完成开始测试,从头至尾裁判没有检查小车尺寸,没有检查是否用ti的芯片。没有检查电机是否用了其他非ti的芯片,测试裁判老师很好第一问三圈在第二次测试时成功完成。第二问固定打靶也是靠开机启动成功完成。第三问稍微调了两次,让丽丽上机重启了两次。才打上了的靶子,这时候基础三问的分儿都拿上了,开始测试巡线打靶,可惜pid没有正常工作提高部分一个都没测试出来,至此电赛结束了。
结束后正好又碰见实验室所有人都测试完了,大家聚到一起拍了张照,比较可惜的是大一的无人机组他们做的非常的好但是遇到了狗屎评委,因为着急吃饭,让他们测试了一轮半。第三轮都没测试就逐客了,只能说是非常的狗屎并且测试之后有很小的问题就把分给扣完了导致无人机组的分很低。只能说比赛的领导特色这口屎必须得尝。想当时工创省赛差不多的屎不过好在我们当时自己争取了一下,得到了公平(实际上努力了半天没有改变明面上的结果 哈哈哈。

成果:省一
成员:23丁兴达(软件算法,Linux上位机,云台控制),23张奥宇(结构设计,msp程序),23黄家瑶(msp底层驱动,报告撰写)

结论
电赛需要分工明确,过往经验很重要多参赛多学习。
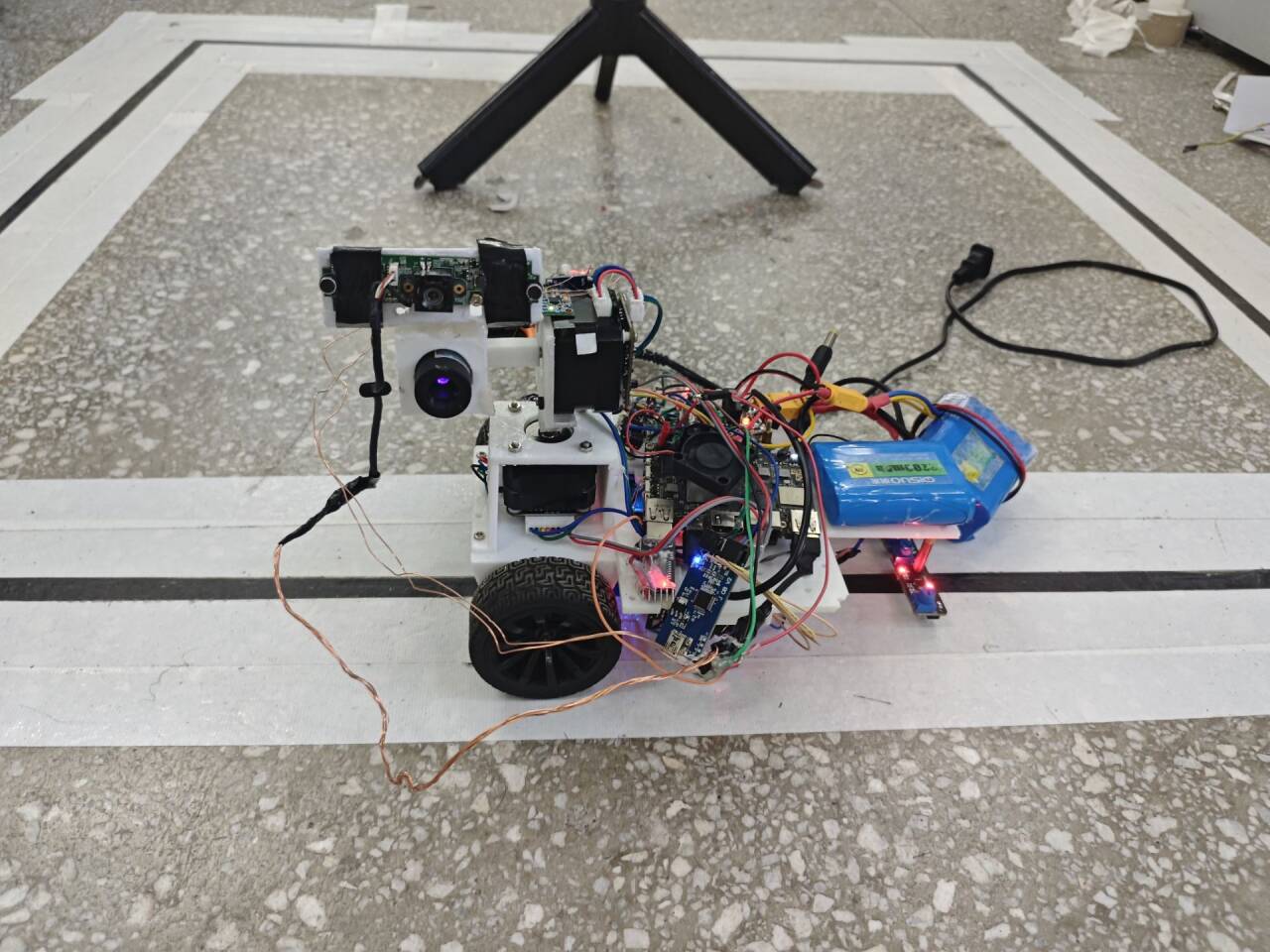
杂图: