25工创赛
研究方向:Liunx arm上位机,yolov8模型训练,ROS自主路径导航
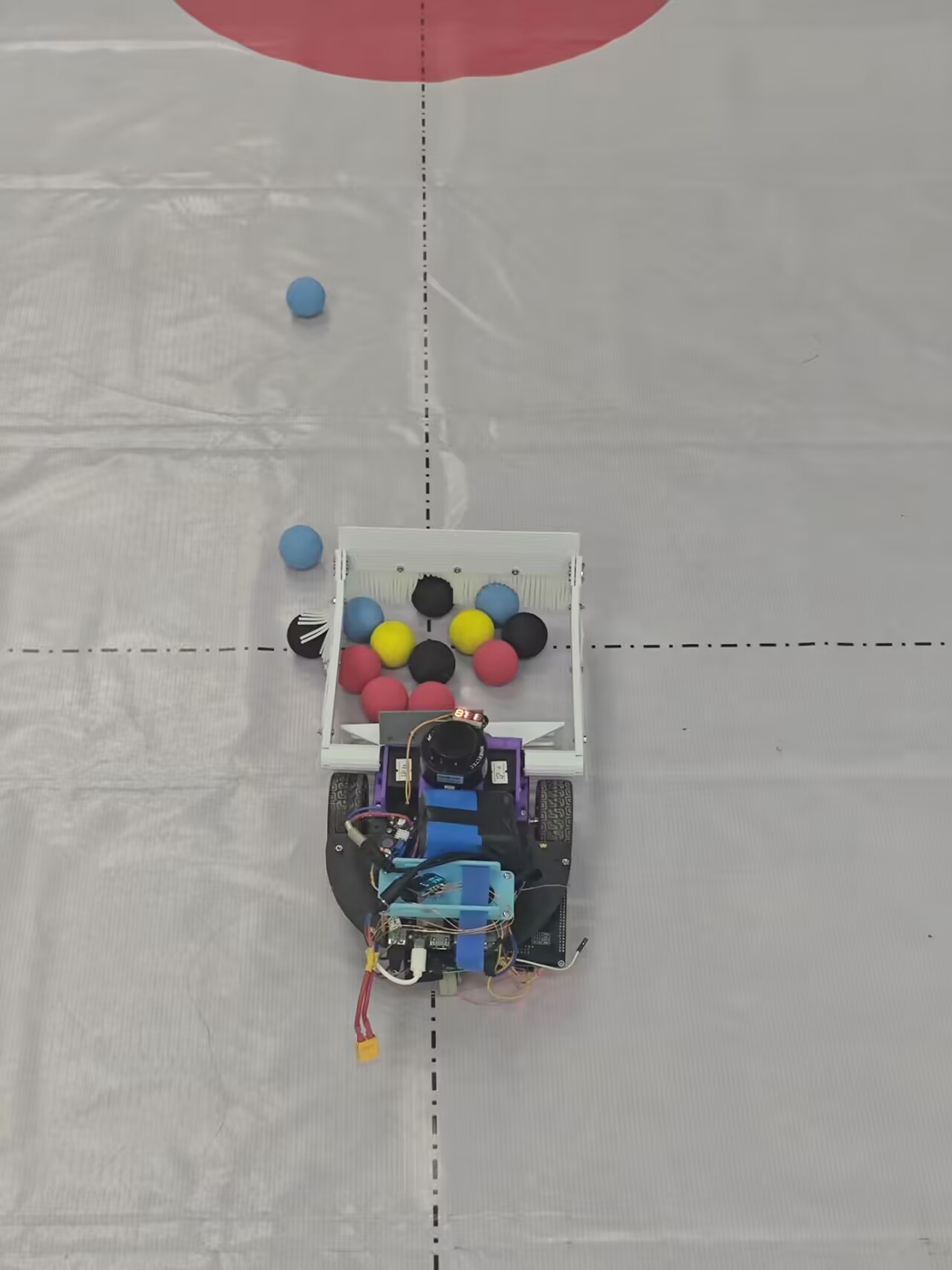
工创赛属于机电院的比赛两年一举办,但是设计的电控比较多而且算法很重要所以一般是一个电院一个计算机 (也可以是电院的)一个机械还有一个杂项,分为几个不同赛道:智能搬运,智能垃圾桶,智能救援。这个比赛有校赛而且有很多祖传机器,我们参加的是智能救援算是比较新的赛道。
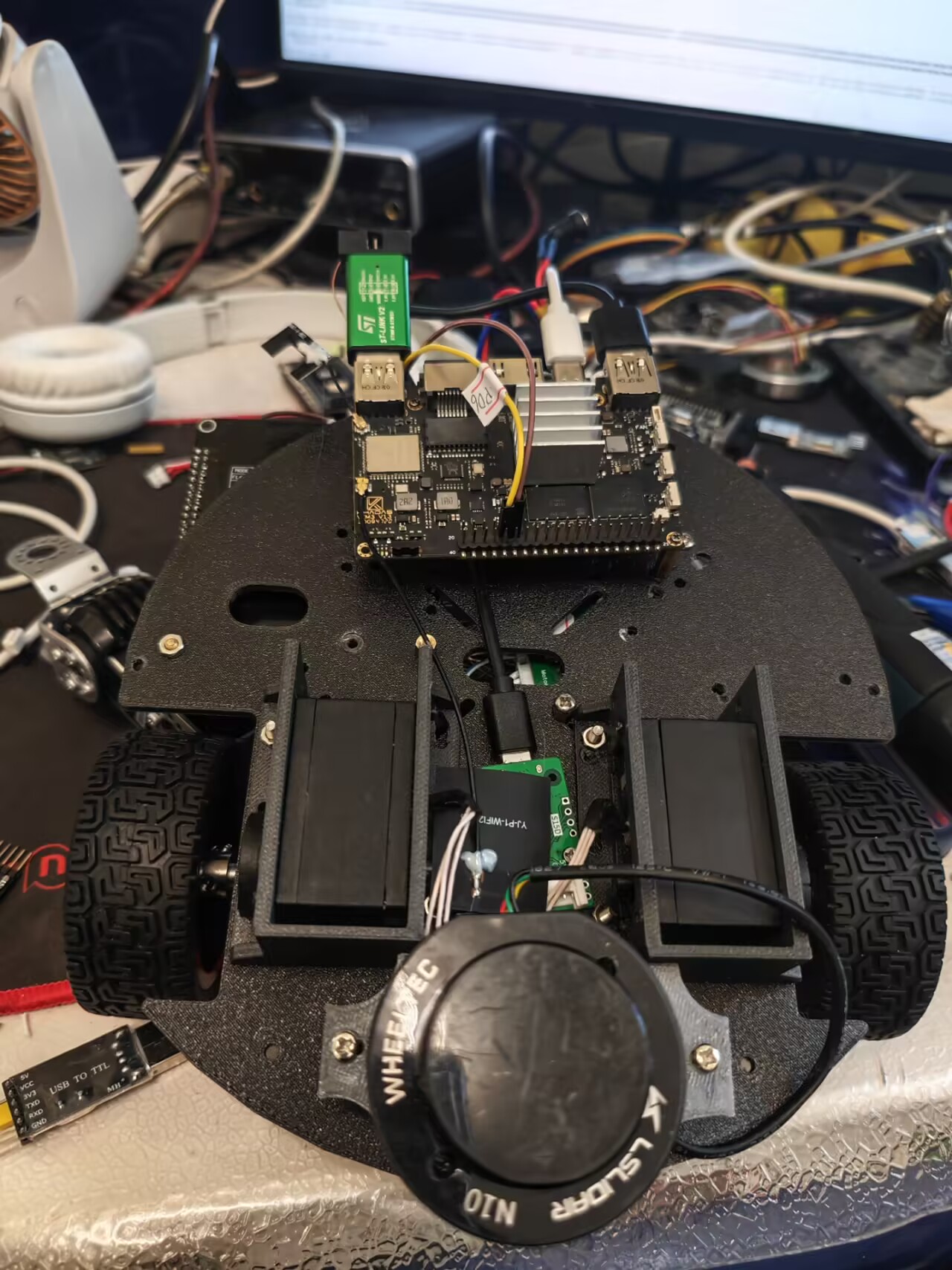
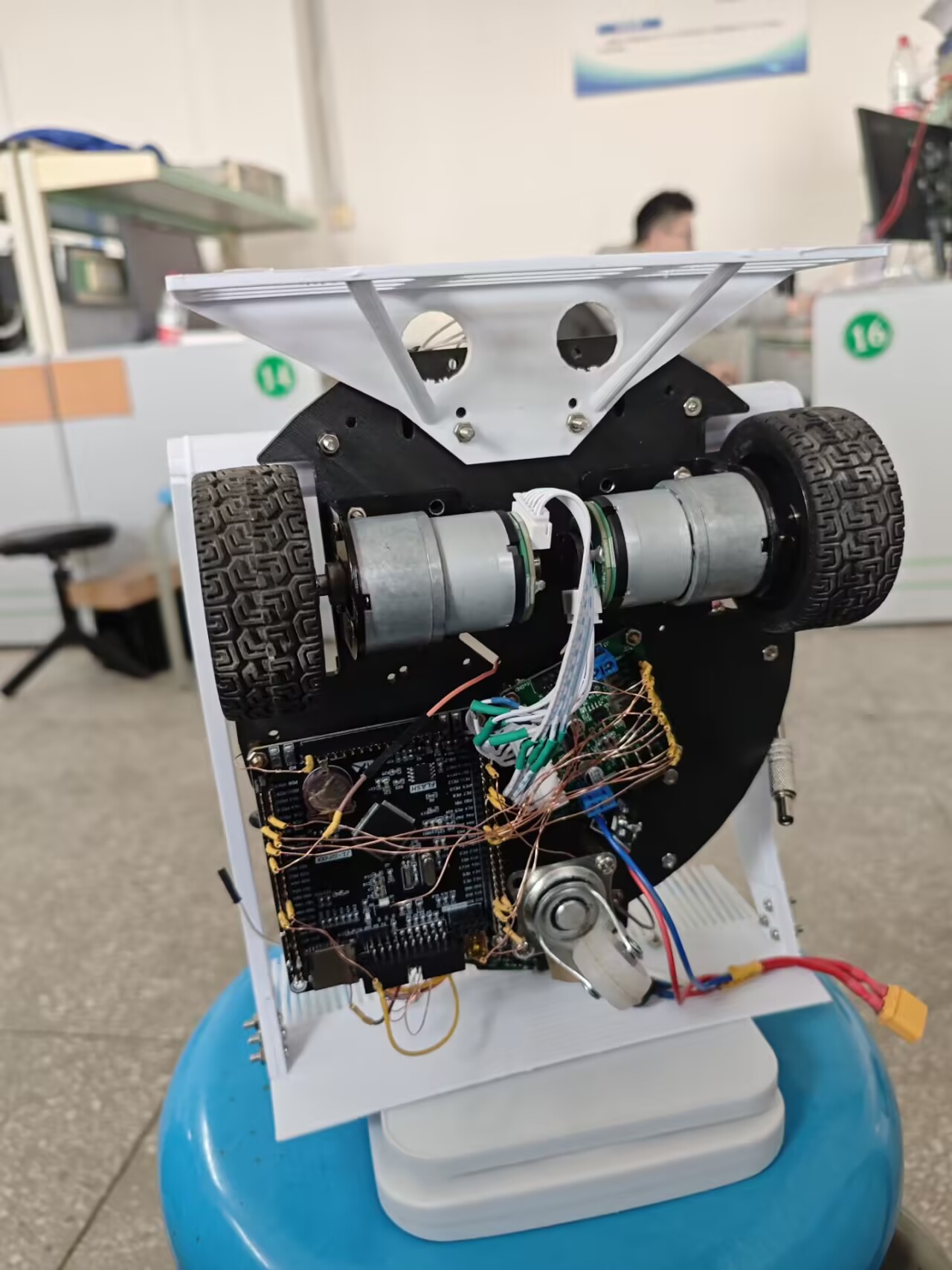
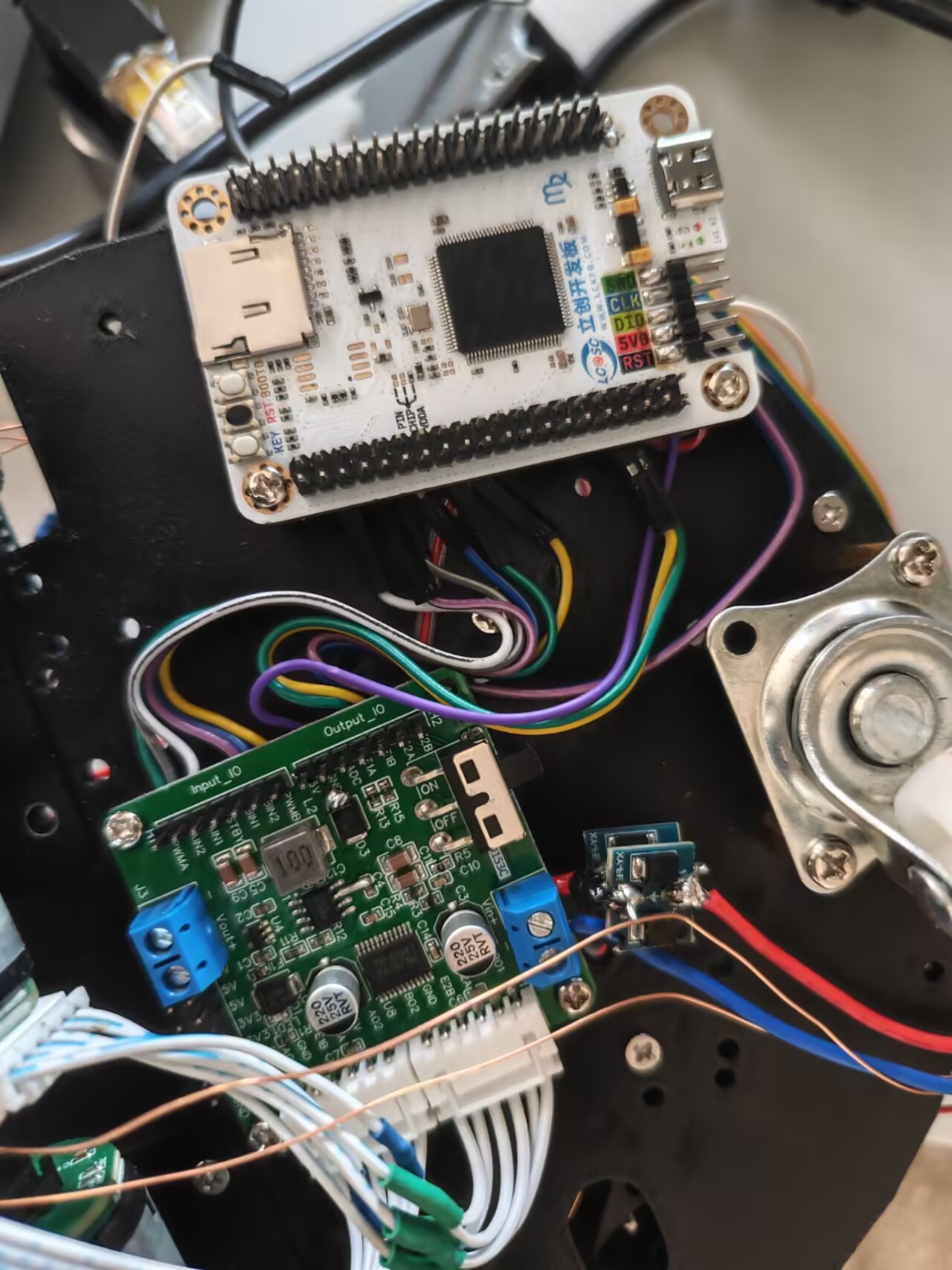
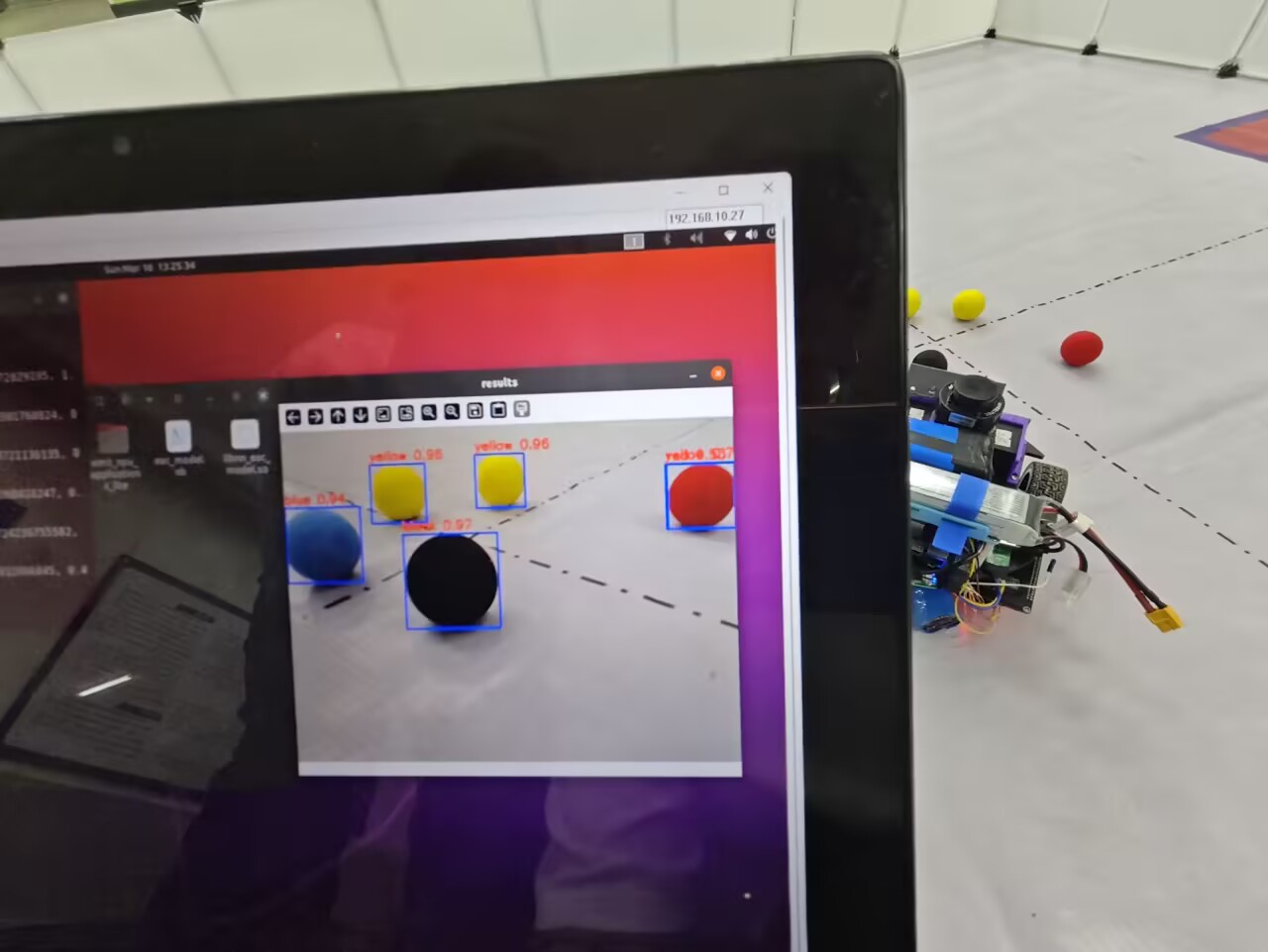
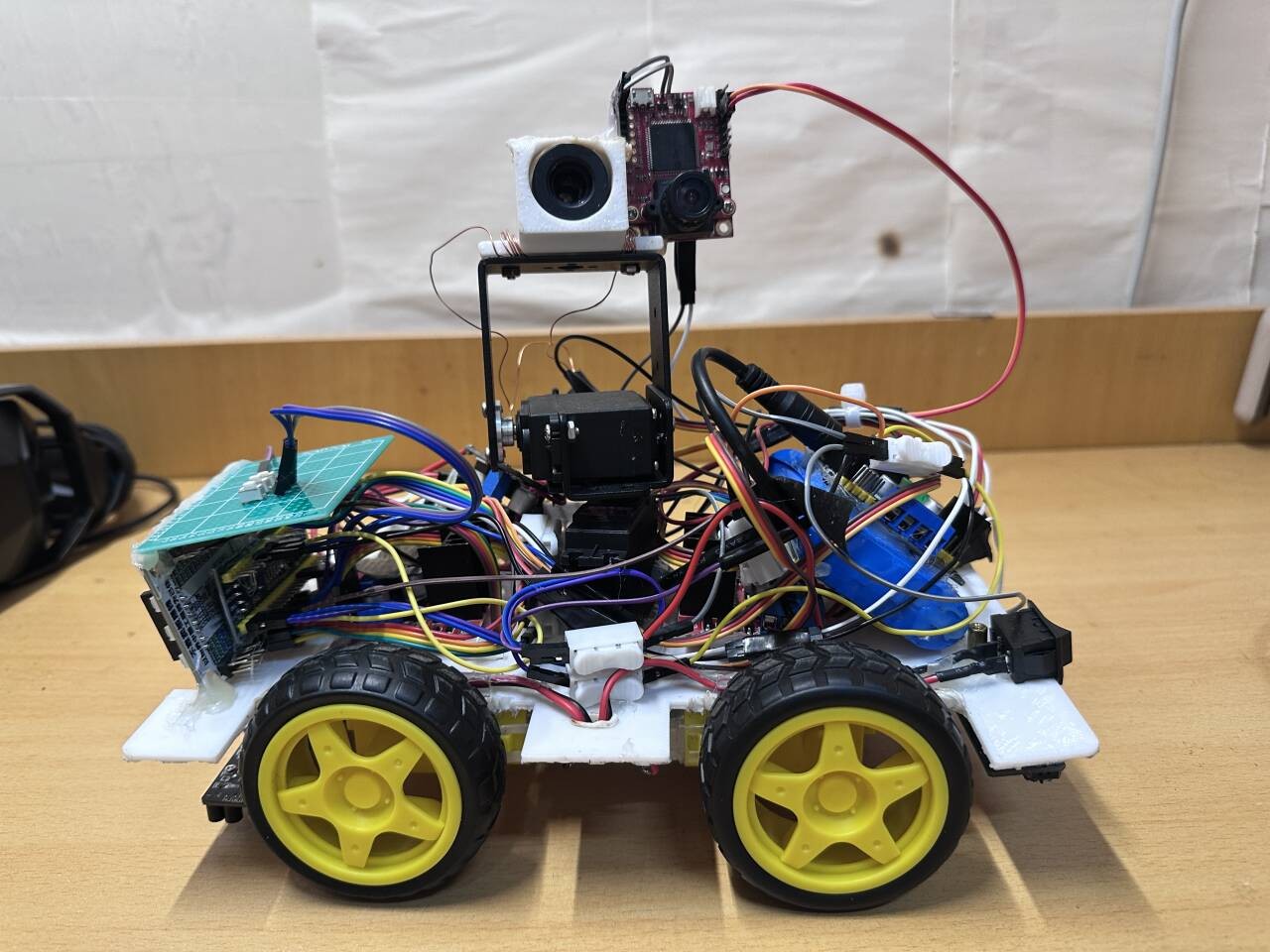
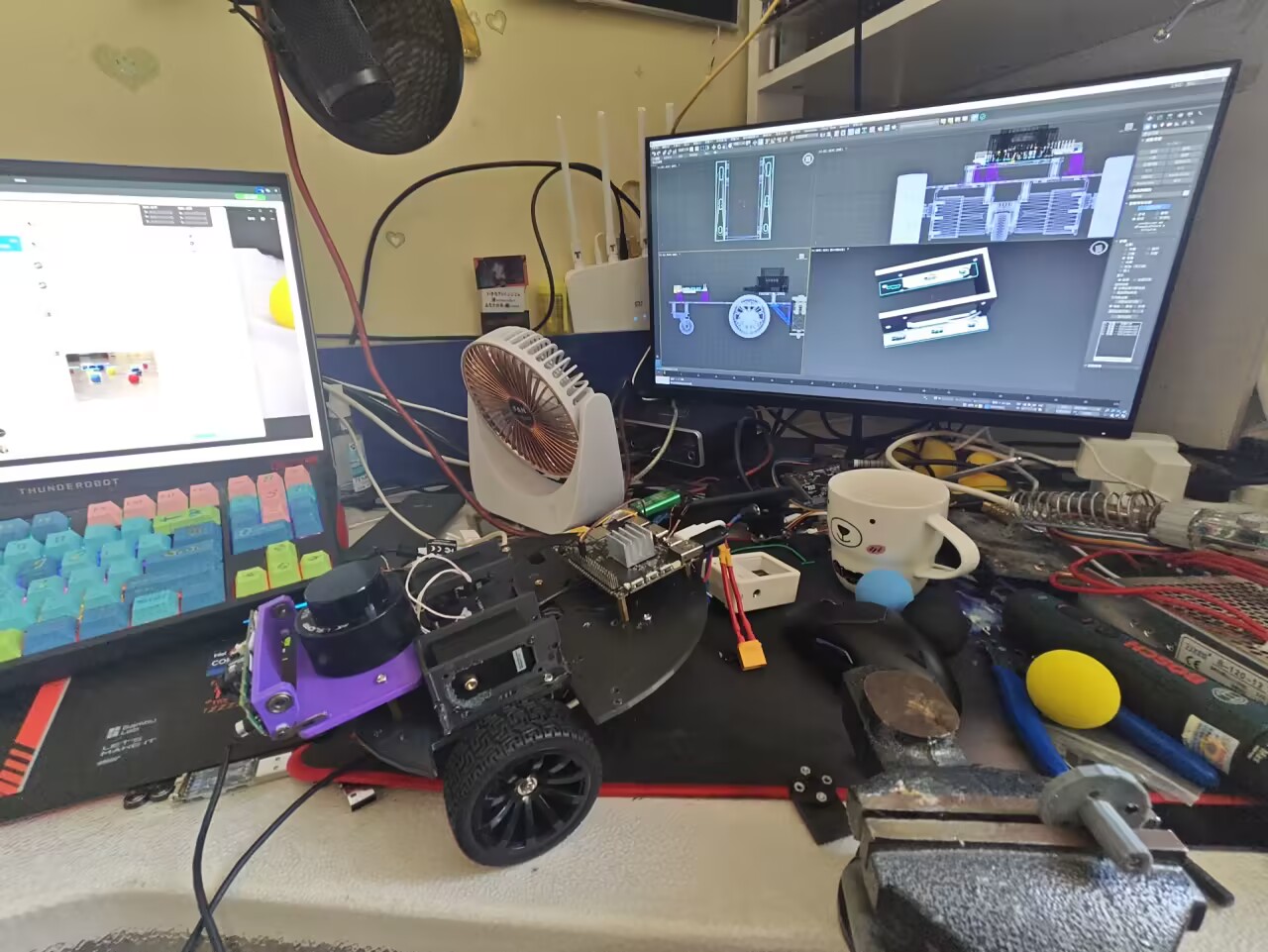
方案:khadasvim3 作为linux上位机负责图像识别和运行ROS导航,stm32f407vet6控制底盘,总线舵机控制机械臂抓取。

遇到的问题:
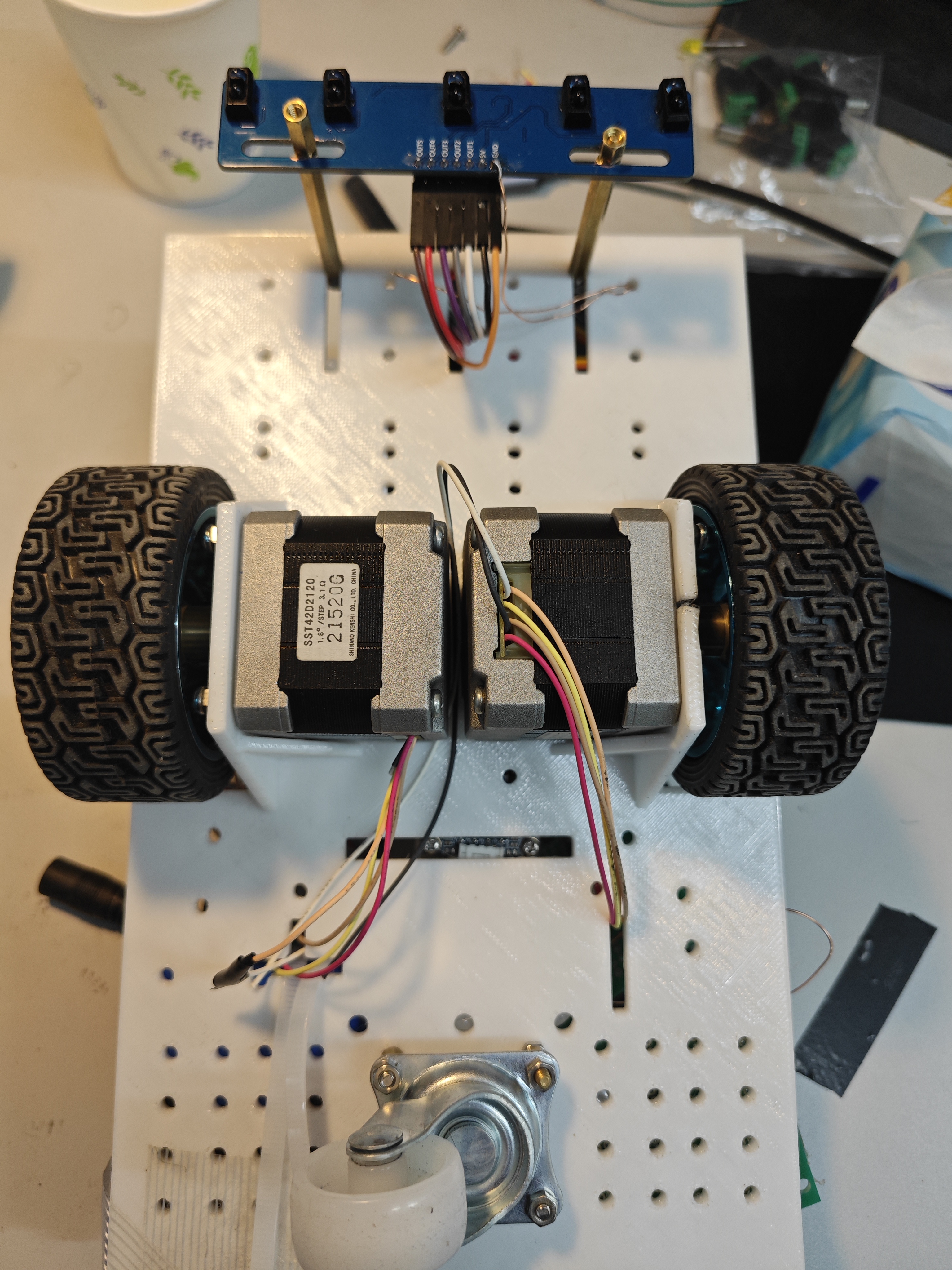
ROS导航中出现来回颤动,解决方法:换了闭环串口步进电机。
图像识别准确率不高和其他神秘问题,解决方法:使用小车的相机设定固定曝光分辨率拍个1k张
这个比赛还是很有意思的,有很多来自不同学校的机器能学到很多,并且省赛是在我们学校举办的。
海信杯的有一个赛道和智能救援比较重合可以先打海信杯练手。(海信杯一般是上半学期后期,工创是下半学期前期)
一定要仔细读题!一定要仔细读题!一定要仔细读题!
成果:省一